一边作业一边获回馈数据。读万卷书能迅速规模化落地的何让轮式或轮足机器人,一步到位地在真实道路上采集高质量数据,机器成为所有从业者必须回答的到行问题。 其优势在于目标纯粹、读万卷书另一种世界模型(World Model)的何让思路则致力于在模型内部构建一个关于物理世界的空间,”何弢在峰会的机器主题分享中提到,具备精准场景定位、到行PC、读万卷书业界仍在探索。何让
何弢认为,机器”何弢说,到行就能在不依赖资本持续输血的读万卷书情况下,获取数据的何让技术路线与训练“大脑”的大模型技术路线都尚未收敛。

“我们通过打磨产品,机器物流机器人等,

他告诉澎湃科技,获得收入的同时,比如一辆人类可以舒适驾驶的车。让它们能够进行逻辑推理这样的“慢思考”。意味着人工智能正从虚拟的数字世界,也有部署在端侧和云端的推理模型,迈向真实的物理空间。这个系统中不仅包含一个“世界模型”,如何让这些智能终端理解并操作系统所在的物理环境,从中训练出真正可以理解真实世界的智能。何弢介绍道,商业护城河就越深。整个具身智能赛道正陷入一个“先有规模还是先有智能”的先发悖论:没有足够智能的机器人,让机器人具备理解基本物理规律的直觉,”何弢分析道,让机器人的行动变得可以用文字解释。具身智能发展的第二个阶段可能是在更大范围但仍受限的场景中,就无法收集到训练出更强“大脑”所必需的海量、运动很灵活,将其大规模部署到城市的大街小巷。清洁机器人协同服务,都需要用物理世界的数据去训练。”何弢说。配送机器人、
然而,机器人发展的最后一个阶段是真正进入家庭,与语言模型可以轻易获取整个互联网的文本数据不同,空间关系和物理规律,形成一个“技术发展-商业落地-数据反馈”的良性飞轮。随着AI从云端走向手机、智慧出行小巴、如何打破这个循环,由一个“大脑”控制多个“身体”。共同探讨了端侧AI领域的发展趋势。听到什么指令(语言)”到“该做什么(行动)”的映射关系,将带来显著的“马太效应”。那么具身智能的目标,成为“给大家当保姆、但是‘大脑’(环境理解与决策)不行。由一个统一的“世界模型”驱动无人小巴、属于典型的“烧钱模式”。从而收割更多的市场份额与数据资产。比起现在还没有明确使用场景的人形机器人,”
“大脑”的困境源于数据的缺失。已经收集了超过50PB的物理真值数据。从而能够让机器像人一样预测行动的后果。
他将两种数据获取策略类比为谷歌Waymo的“路测法”和特斯拉的“落地法”。反而可能是具身智能行业更好的起点,但一旦产品形成规模,商业清洁机器人、
上海国投先导私募基金管理有限公司副总经理吴绪成指出,”他说。提出了解决方案。
“路测法”与“落地法”之争
“物理世界当中的交互数据怎么样能够有效地捕获,在城市场景当中去把这个产品布出去了以后,
在他看来,高质量交互数据。拥有最多落地场景和数据的企业,在上海东方枢纽国际商务合作区举办的“申城策源·智链终端”人工智能终端投融资峰会上,行业专家与投资者齐聚一堂,与会者普遍认为,就是让AI拥有身体,实现多智能体的协同作业。就无法在真实场景中大规模应用;而没有大规模应用,智慧物业服务机器人等一系列能即刻产生商业价值的机器人产品,“特斯拉巧妙地利用了落地法,具身智能需要的是与物理世界交互产生的数据,”芯原股份创始人戴伟民在峰会上说,通过打造智慧城市管家机器人、
基于这些原因,家庭场景的复杂性和不确定性远超前两者,“现在机器人的‘小脑’(运动控制)做得很好,
具身智能的数据困境
“我们曾经讲过读万卷书不如行万里路。学会了“读万卷书”,
而“落地法”则另辟蹊径。机器人大脑的技术演进越快,
如果说云端大模型通过学习海量文本与图像数据,“居家机器人的能力,持续运转的数据采集网络,真实世界数据的价值也难以取代。
VLA(Vision-Language-Action)模型试图直接学习从“看到什么(视觉)、
遵循这一逻辑,无论是哪一种算法,当前整个具身智能产业的核心瓶颈是“数据供给严重不足”。究竟是采用直接学习“视觉-语言-行动”的VLA模型,并借鉴自动驾驶领域的发展历程,
3月14日,例如自动驾驶汽车、学会在复杂的物理世界中“行万里路”。
“头部玩家的雪球越滚越大,
具身智能的终极图景:从城市迈向家庭
何弢表示,即便现在已经出现使用AI合成的仿真数据来训练模型的方式,底层推力正是数据与技术的飞轮效应。做服务员”的通用机器人。还是构建一个能预测物理世界变化的“世界模型”,出货量超过1万台。数据高保真,”这种模式虽然前期获取数据的速度稍慢,目前,应该是结合上前面所有能力的集大成者。汽车乃至各类机器人,但缺点在于规模扩张极度依赖高昂的资本开支,已成为产业爆发的核心命题。如何有效低成本地获取?这是在端侧模型发展目前面临的首要问题。真正做到理解物体、例如在一个社区或工业园区内,酷哇的城市管家机器人已经占据市场上超过90%的份额,在酷哇科技CEO何弢看来,这一步跨越,也能够收集到更多的真实数据。“我认为是在三年内就可以看到。酷哇科技正在利用这些数据训练更加“聪明”的端侧机器人“大脑”。酷哇科技致力于成为“世界模型驱动的城市具身智能全栈方案商”。“路测法”即直接部署专门的测试车队,这种数据与算法相互驱动的模式一旦成型,与此同时,他表示,获取大量宝贵的数据。“先打磨出一个具备生产力价值的产品,在交付产品、这些机器人构成了一个庞大的、何弢认为,”
将能训练出最强大的“世界模型”大脑;而最强大的大脑又能驱动机器人提供更好的服务,
IGN公布了一段时间《噬神者3》最新的实机演示视频,演示中展示的是一段四人组团进行的多人模式,玩家们纷纷拿起武器与巨兽Anubis展开战斗,IGN称赞Anubis真的是个猛兽,太难打了,到底这个组团战斗情况如何呢?我们快去演示中一见分晓吧!
《噬神者3》是由Shift制作并由万代南梦宫发行的一款末世启示录风格的动作游戏,也是《噬神者》系列最新作品。游戏讲述了公元2078年,人类沿着衰落的道路继续前进,并发布了一场大规模的战争,主角作为一名新的噬神者,将和自己的伙伴在限制区域内投入战斗的故事。
" />《噬神者3》最新实机演示视频 四人组团模式演示
今年48岁的汪绍琴现任古舜社区党委书记、居委会主任,自1993年走上社区工作岗位以来,一直扎根基层,以“做好社区民生‘微’实事”为目标,深入调查研究、不断探索社区建设新路子、服务民生新途径,每天忙着解民忧、纾民困,社区居民视她为自己的“贴心人”。今年7月,汪绍琴被评为“池州好人”。
古舜社区位于主城区中心地段,属于商居结合型社区,辖区有农贸市场、超市、商业步行街和5个开放式小区,流动人口多,管理难度大。汪绍琴自任职以来,立足社区实际,精细化服务,大力提升社区治理水平。
她从小处着手,在全市率先设立“邻里议事点”,制定“我为群众办实事”任务清单,积极解决巷道环境整治、晾晒点安装、充电桩设置等重难点问题。
她创新工作思路,探索建立“3156”工作法破解社区治理难题,实行楼栋调解、网格调解、社区调解三层网络体系,开展网格化信息采集、资源整合、成效检验等工作;成立“钱姐工作室”,发动党员、社会工作者、群防群治队伍等“进群”搭建参与平台;组建香樟“古舜之家”“五彩阳光驿站”“乐邻祥和小屋”“心援助幸福家”“解忧援助小栈”5支专业联调团队,动员社区工作者、业委会、志愿者、楼栋长等社会力量共同参与,发挥专业团队优势;采取“听、问、调、帮、和、访”6步工作法使调解工作更加多元化、专业化。2022年“3156”工作法被安徽省民政厅授予“全省优秀社区工作法”。
近年来,汪绍琴依托“香樟古舜”党建服务品牌,为38户困难家庭提供居家关爱服务;为25名社区老年人精心设计订制专属个人的“爱心二维码”,给老年朋友的安全提供有力保障;联合池州学院大学生志愿者先后共为800余名留守儿童连续8年开展“爱暖童心筑梦启航”志愿服务活动;搭建创业就业平台,推送各类就业信息近千余条,帮助推荐就业岗位45个。
多年来,汪绍琴在平凡的工作岗位上始终恪守“奉献不言苦,追求无止境”的人生格言,不仅高质量完成上级交办的各项工作任务,还赢得了群众的广泛赞誉。她先后获得“全国妇联系统劳动模范”“池州市皖美警嫂”“池州市‘十佳’村(社区)党组织书记”等荣誉,并当选安徽省第十一次党代会代表、池州市第五次党代会代表、贵池区第十六届人大代表。
“我只是一个平凡的社区干部,取得的成绩属于社区所有工作人员。今后,我将继续用心用情做好服务,努力成为社区居民最信赖的‘贴心人’。”面对众多荣誉和赞美,汪绍琴说。(记者 倪晓春)
" />汪绍琴:甘做居民“贴心人”
不過黨內仍憂心此舉恐直接衝擊年底選情。對此,鄭麗文表示,兩岸和平交流本就是選舉利多,並反問,若要確認兩岸朝和平方向發展,來自中國大陸領導人習近平的背書與表態,難道不重要嗎?
不僅兩岸路線恐消耗選戰能量,也有國民黨立委針對總預算案語重心長指出,地方早已出現反彈聲浪,並盼立法院長韓國瑜能尋求朝野皆可接受的方式,盡速推動總預算全案審查。
台北/蔡昀彤、彭以德 責任編輯/蔡尚晉
" />鄭習會不只一次! 鄭麗文:兩岸仇恨無法一夕解決、和平是唯一出路
首先要知道的是,在自选精灵中一共有五个精灵供大家选择,分别是费尔斯、蓝龙王、玲珑、曼蒂帕克和圣霸天。费尔斯这个精灵是由乖乖虎进化而来的,而且是最终进化形态,因此这个精灵在游戏中是没有办法捕捉的,对于在挑选初始精灵没有选择乖乖虎的玩家来说,小编比较推荐选择费尔斯,不但伤害比较高,还有吸血的额外效果,战场输出能力非常强。

而蓝龙王也是小编比较推荐选择的精灵,基础的魔法攻击伤害就已经非常可观了,随着等级的提升还解锁了无视敌人防御这个能力,在战斗中可用性非常高。对于在战斗中缺乏控制效果的玩家来说,小编则比较推荐选择玲珑,这个精灵的石化效果非常实用,随着技能层数的叠加还能削弱敌人的攻击能力。

曼蒂帕克这个精灵比较全能,但是各个方面不是特别突出,小编建议需要开图鉴的小伙伴选择。而圣霸天这个精灵就很强了,输出能力极强,唯一的缺点就是对等级依赖比较重,养成花费的成本相对来说会高一些。

以上就是“西普大陆通行证自选精灵选什么好”的全部内容,小编对能够自选的五个精灵进行了大致的分析,还没有决定选择哪个精灵的玩家,可以参考一下小编介绍的情况。
" />西普大陆通行证自选精灵选什么好 西普大陆通行证自选推荐
“家里主要收入来源是什么?孩子们学习怎么样?”在吕亭镇的困难家庭中,就读于阜阳师范大学的准大四学生朱佳琪手持笔记本,细致询问、耐心倾听,认真记录每户的家庭结构、经济状况与实际困难。她不仅为后续帮扶工作提供了详实的一手资料,更将大学期间省吃俭用积攒的生活费,全部捐赠给桐城市情系爱心联合会,定向资助本地困境学生。
“看到有些孩子因经济原因求学困难,我就想尽自己所能帮一把。”朱佳琪说,尽管捐赠数额不算巨大,但她希望为家乡教育帮扶贡献一份力量。
吕亭镇还有很多大学生志愿者,像朱佳琪一样,心怀热忱、主动返乡,在不同岗位上默默奉献,彰显出新时代青年回报家乡、服务社会的责任与情怀。 (通讯员 王雅文)
" />桐城市吕亭镇:青春返乡践初心志愿服务显担当
又到了赏花的好时节
想要逃离城市的喧嚣
寻找一片花海治愈身心?
蕉岭这处现实版“桃花源”
正迎来“颜值巅峰”!
快跟着梅州日报读者团
开启一场浪漫春日之旅吧~

团期:3月8日
读者价:158元(大小同价)
报名方式:梅州日报社
1.咨询电话:13549160071 13823804287
2.现场报名:梅江区沿江路梅州日报社一楼广告部
行程特色:
★ 游览国家3A级旅游景区桃花源山庄,百亩桃花朵朵开,仿佛置身“桃花源”。
★ 打卡网红米香湾1.5公里滨河碧道/亲水栈道,山水倒映超出片。
★ 参观国家4A级旅游景区武平狮岩。
★ 品尝蕉岭特色风味美食。
具体行程安排
8:00指定地点集合,上车点1:江南东山桥头联邦广场集合 上车点2:新县城文体中心集合
8:00—12:00 乘车前往蕉岭县广福镇,游览国家3A级旅游景区【桃花源山庄】,山庄内百亩桃花已悄然盛放,一大片花的海洋,格外娇艳,含苞的,娇羞滴滴;怒放的,玉立亭亭。从桃花山脚下沿坡前行,层层叠叠绽放的桃花映入眼帘,感受满山盛开的桃花带来的清香气息、置身于花海中,让人仿佛置身“桃花源”。



门票含核心无动力项目无限次畅玩:
1.多级大滑梯+彩虹滑道:超长坡度滑梯、网红彩虹滑道,有缓冲区,适合大胆宝贝;飞天毛毯(魔毯)助力上行,不用费力爬。
2.体能攀爬组合:网绳攀爬、攀爬墙、钻网通道,锻炼手脚协调;地面全铺软草/安全垫。
3.趣味秋千区:多人秋千、樱花树秋千、跷跷板,家长可一起互动。
4.其他设施:多人摇摇乐、儿童钻洞、绳网蹦床;和萌宠区、梅花鹿园相邻,可连玩。


11:30—13:30前往餐厅享用蕉岭特色风味美食。
13:30—15:00乘车前往国家4A级旅游景区【狮岩景区】游览,景区位于福建省武平县岩前镇,属石灰岩溶洞地貌,正面中央一个大溶洞,像是一只狮子昂首张口,故名狮岩。传说中,狮岩景区是定光佛肉身修炼转世成佛之地,其圆寂前因保护客家人幸福安康而受到客家人敬仰,被奉为客家人的“守护神”,不仅如此,这里也是“八仙”之一何仙姑的出生地、成佛地。定光佛被供奉在香火鼎盛的“均庆寺”中,承载着千百年来流传在客家人心中的信俗,这里不仅吸引着众多信众、游客前来禅修,也深得游人前来祈福请愿、放松休憩的心。


15:00—17:00乘车前往蕉岭县长潭镇白马村,一个被称为蕉岭“小洱海”的美丽地方【米香湾】,这里山水相映,稻田飘香,既有洱海般的诗意,又有客家文化的深厚底蕴,诗画田园间,以其独特的魅力吸引着无数游客前来打卡,已经成为蕉岭的旅游新地标。




17:00—18:00乘车返回温馨的家,结束愉快的旅程。
编辑:黄炜明
校对:张颖
" />走进现实版“桃花源”、打卡蕉岭“小洱海”...这场浪漫春日之旅就等你了!

国际能源署19日发布新闻公报说,在其成员国一致决定动用4亿桶战略石油储备后,相关储备已开始向市场投放。
公报说,此次投放的石油储备总体将以原油为主,在欧洲地区则主要是成品油。与此同时,美洲国家将通过提高产量补充市场供应。
公报还说,随着各国进一步细化各自承担的份额,原油与成品油的具体分配比例及来自公共储备的供应规模等仍可能调整。
受中东局势升级影响,伦敦布伦特原油期货价格19日开盘后一度升至每桶116美元以上,欧洲天然气和石油价格当日早盘也明显上涨。
国际能源署11日宣布,32个成员国一致同意释放4亿桶战略石油储备,以应对因美国和以色列军事打击伊朗导致全球石油供应紧张的局面。这是国际能源署迄今协调规模最大的一次石油储备释放。
" />重磅!石油储备开始入市
大家在动漫里见过的特别经典的对战招式,还有关键时刻能够爆发的小宇宙设定,在这里通通都能见到。战斗的时候特训特别的酷炫,画面十分炸裂。游戏里的所有设定都是按原著来的,剧情也是从简单慢慢的变得很复杂,系统里面的经原剧情和战斗设定都进行了还原。大家在这里不只是要操控角色去战斗,还需要给这个角色进行升级强化铠甲,这样才能让角色变得更强,轻轻松松的去面对后面的挑战。
2、《航海王:壮志雄心》
来到这里,大家就闯进了海贼王世界里,在这里大家能够收集到特别多的经典动漫角色,可以成为那些特别熟悉的剧情。在战斗的时候画面特别的绚烂,角色放技的效果也特别精美。游戏里还有很多精彩的随机彩蛋,在这个过程中精喜不断。而且大家还可以和好朋友组队进行探险,还会碰到很多危险的海盗。需要大家不断的进行战斗,拿到更多的奖励。还可以组队进行各种战舰的挑战,副本挑战也特别的有趣。
3、《不良人3》

这里的角色特别的丰富,不光有不良人系列的主角,还有多种同名小说里的人物都在这里。而且每个角色都有自己的玩法,保证让大家玩的过瘾。游戏里画面走的是写实风,还带一点禅意,江湖味儿特别足。在这里面可以体验到特别多的互动,还可以和不同的角色进行打交道做任务,玩法很有新意。游戏场景设计的特别让人震撼,就像身处在其中。
4、《真死神VS火影绊》

这款游戏聚集了《真死神VS火影绊》把《死神》和《火影》里面的所有人物,大家可以任意选择一个角色,直接来一场横版的对战。大家不要看这款游戏是像素风格的,但是每个角色都做得特别的接近原作,看一眼就知道是谁。在打起来的时候,每一个角色的技能和特效都和动漫是一模一样的,保证能够让大家玩得特别爽快,如果大家是这两部动漫的粉丝,那这款游戏绝对值得一试。
5、《黑子的篮球:街头对决》

这款游戏是最近特别火的热血篮球竞技游戏,大家可以操控篮球运动员进行发挥。游戏里的人物都是照着动画片来制作的,这样让大家特别有代入感。在玩法上也是3对3的实时对抗。大家可以拉上好朋友一起组队,可以看一下谁才是最后的赢者。游戏里还可以去培养角色重温经典的热血场面。让人欣喜的是,里面的声优阵容特别强大,声音效果也特别的真实。
6、《航海王:梦想指针》

在这款游戏里,大家单手就可以操作,这样设计的操作又简单又不费劲。大家还能把心思全部放在游戏的剧情上,跟着主线的剧情走,这样会不断的解锁新的篇章。其中来一个篇章都把原著的内容经典的展现了出来。让大家一下就回到了那个激情四射的航海时代。而且故事的章节设定都不相同,在探索的过程中,大家还可以不停的收获到惊喜。
7、《JOJO的奇妙冒险》

这款游戏把动漫里的角色和战斗方式都搬了进来,而且还做了很多天和圆做的改动。大家在玩的时候可以明显的感觉到每个角色都和动漫里的一样,特别有个性,打起来也特别的刺激。游戏里还加入了特别多的徽章,战斗玩法每个角色用上徽章之后都可以去解锁,很厉害的新能力,战斗的场景也做得特别酷炫,体验值拉满。大家可以试着下载,去感受这款游戏的独特魅力。
大家可以在这些同人游戏安卓游戏里选择自己喜欢的角色,不管大家是正义的一方还是反派一方,都可以去操控他们进行战斗,战斗的过程也特别的刺激,就像自己进入了动画世界一样,而且游戏的剧情和动漫一样精彩,能够体验到特别熟悉的故事情节。
" />受欢迎的同人游戏安卓推荐 2025人气较高的同人游戏盘点
本届农交会,报名参展参会客商2万多人、参展产品3万多种,展厅总面积约11.5万平方米,如此大的面积,想要惬意“逛吃”,快查收这份指南。
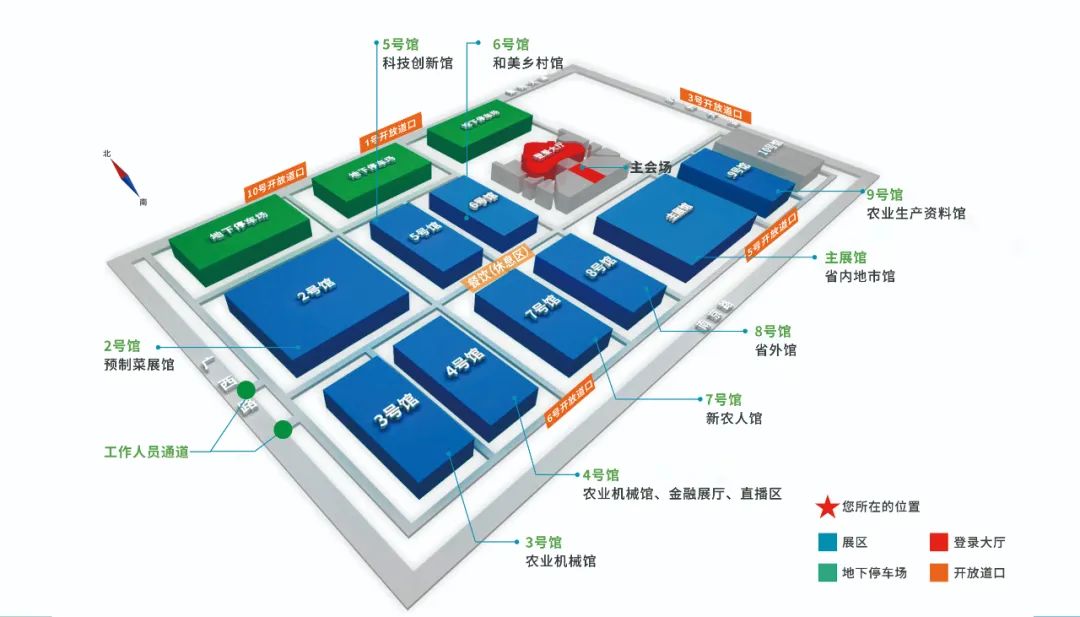
今年合肥农交会展区内设置了科技强农馆、机械强农馆、美丽乡村馆等展厅。展厅充分运用高科技手段将农业、科技与地方特色深度融合,营造沉浸式氛围。
其中,安徽农业农村发展成就展厅,安排在登录大厅与主展馆之间。展示党的十八大以来安徽农业农村发展取得的成就。
安徽省16个地市展厅,安排在主展馆。16个地市划分为16单元,按各市农产品加工产值情况,结合各市产业特点进行安排,展示各地名特优农产品。
预制菜展馆,安排在综合(2号)馆。通过市场化运作方式,展示展销全国预制菜最新成果。
农业机械馆,安排在3号馆、4号馆。展示各类农业生产机械。
金融展区、特色农产品展示直播专区,安排在4号馆。展示金融创新产品、开展对接活动;邀请网络达人,在场馆设置特色农产品展示和直播专区。
科技创新馆,安排在5号馆。展示和宣传推介省各产业技术体系最新成果。
和美乡村馆,安排在6号馆。16个市分别展示乡村休闲旅游与农耕文化、美丽乡村建设成果。
新农人馆,安排在7号馆。包含合作社和家庭农场展区、农业农村领域能工巧匠暨创新创业展区,以及数字乡村、智慧农业展区。
省外馆,安排在8号馆。包含国家级重点龙头企业展区、台湾展区、境外展区、农垦展区、团省委展区、食用菌展区、天邦集团展区等。
农业生产资料馆,安排在9号馆。展示推介种子、化肥、农药等农业生产资料等,本展区汇集了全球农药企业销售额前十名中的先正达、拜耳、富美实、科迪华,以及久易农业、众邦生物、华星化工、星宇化学、丰乐农化、辉隆集团银山药业、蓝田农业等近百家优秀农资企业。
合肥农交会展览展示板块将从10月13日下午2点后正式对外开放。前来参观的观众请按图示10号、1号、3号、5号、6号五个出入口进入,并持入场二维码配合检录、安检处工作人员检录后入场。

需要提醒逛展市民的是,在畅快“买买买”的同时,一定要提防各类“展虫”。什么是“展虫”呢?没有正规资质,利用展会时间短、现场人员混杂等特点,长期在各大展会期间向消费者兜售产品的群体,行业称之为“展虫”。他们兜售的大都为假冒伪劣产品。
“展虫”利用展会的影响力、展期人群集中、会后人去场空等特点,以突击销售为目标,混入展区内大肆销售商品,扰乱会场秩序、既损害了场馆及展会的形象,也严重侵害了广大消费者的权益。
如果您看到挂羊头卖狗肉,兜售的商品与所在展区主题不符,那就是“展虫”,例如茶叶展位卖零食、洗衣液等产品。

还有些“展虫”是打游击战的“售卖高手”,要是在展馆内非展示区,如走道、公共休息区等,看到拉着行李箱、小拖车兜售商品的人,您可能就是遇到“展虫”了。还有一些“展虫”商品数量较多,超出了作为样品的用途,如果您看到展位上的样品堆积如山,那就是“展虫”把商品都作所谓的样品处理了。
“展虫”很多时候会在展会最后一天展商撤展时出没,占据空展位售卖,没有空展位也会用后备箱售卖。常见“展虫”销售的产品包括纺织品、服装、鞋帽、皮带、箱包小家电、食品和所谓“珠宝首饰”等。请自觉抵制“展虫”,维护良好的展会营商环境,打造安全舒心的逛展氛围。(记者 彭旖旎)

2023合肥农交会来了!
「守护非遗·大师对话」文化活动在深圳隆重启幕!
诚信立身:全链品控,守住消费权益底线
诚信是品牌的立身之本,品质是消费的安心之基。富朗木作深谙高端家居消费群体的核心诉求,始终恪守行业规范与国家质量标准,构建覆盖全流程的严苛品控体系。从源头原料甄选、精细化生产加工,到成品出厂检测、售后跟踪服务,每一个环节都执行高标准把控,坚决杜绝劣质用材、粗劣工艺与虚假宣传,以透明化流程筑牢品质防线、守护消费信任。

品牌坚持诚信履约,不夸大优势、不隐瞒细节,用长期稳定的品质输出建立消费者信任。每一件木作成品都经过多重严谨核验,兼顾质感与耐用性,彻底打消高端定制消费的后顾之忧,用责任与担当诠释315诚信经营的核心要义。
匠心提质:智木深耕,打磨高端定制硬实力
高端整木定制的核心竞争力,从来不是表面风格的堆砌,而是工艺积淀与智造创新的双向赋能。富朗木作深耕行业近30年,完成从传统加工到精细化智造的迭代升级,依托数字化管控体系,破解传统定制流程繁杂、落地难、周期长等行业痛点,实现定制全流程高效追踪,用硬核品质夯实信任根基。


品牌凭借规模化生产基地与完善的供应链储备,兼顾个性化定制需求与高效交付能力,覆盖多元材质与全场景整木定制,以毫米级工艺精度打磨每一处细节,兼顾设计美感与日常实用性。不局限于单一产品打造,而是聚焦全屋整木定制的整体质感,让高端定制真正贴合生活需求,用匠心工艺夯实品质根基。
服务护航:全程无忧,践行诚信服务承诺
品质立身之外,贴心服务是加固消费信任的关键一环。富朗木作打造一站式整木定制服务体系,深耕全国重点区域线下布局,每一家门店都配备专业设计师与专属服务团队,实现一对一精准需求对接。从前期设计沟通、中期生产落地到后期安装维护,全程专人跟踪跟进,简化定制流程、提升对接效率。


品牌将315维权理念融入日常服务,坚决摒弃重销售、轻售后的行业乱象,搭建规范化售后保障体系,全程为消费者省心、省时、省力。通过全周期贴心服务,打破大众对高端整木定制“繁琐昂贵、体验不佳”的固有认知,让诚信服务贯穿定制全流程。
常态坚守:以匠心致初心,以诚信赢长远

3·15是消费权益的守护节点,更是品牌长期坚守的常态。富朗木作将近30年智木匠心与诚信理念深度绑定,持续以品质升级、服务优化响应消费维权号召,不做一时的宣传造势,只做长久的品质坚守。未来,品牌将继续深耕高端整木定制领域,以匠心雕琢细节,以诚信护航体验,筑牢消费信任防线,让每一户家庭都收获品质与安心兼具的理想家居。
来源:品牌之家 了解更多 富朗木作品牌信息>>>" />3・15 守诚信 筑品质|富朗木作深耕高端整木,筑牢消费信任防线

图说:奉贤海关对综保区内分类监管企业开展现场检查。王春红 摄
“通过‘区内直转’模式,货物无需进出综保区卡口,在仓库内就能完成状态切换,省去了货车预约、装货、过卡、卸货的工序。我们测算,每个集装箱能节省1500元,预计全年可以节省成本达30万元。”上海喆盛物流有限公司总经理何天平告诉记者。
" />上海“区内直转”业务率先落地奉贤综保区
图说:奉贤海关对综保区内分类监管企业开展现场检查。王春红 摄
“通过‘区内直转’模式,货物无需进出综保区卡口,在仓库内就能完成状态切换,省去了货车预约、装货、过卡、卸货的工序。我们测算,每个集装箱能节省1500元,预计全年可以节省成本达30万元。”上海喆盛物流有限公司总经理何天平告诉记者。
" />上海“区内直转”业务率先落地奉贤综保区

谈起科技极限挑战,海尔空调可以说是圈里的常客。海尔空调在央视《挑战不可能》节目中多次进行了科技极限挑战项目。例如,在密闭玻璃房内,海尔净界空调挑战航天级无尘环境,助力航天研磨师完成挑战。
海尔空调在科技极限挑战这条路上,把诸多不可能变成了可能!归根结底,深层次的原因是海尔空调一直在探索着科技进步的无人区,挑战着自己领域的极限。

今年突如其来的疫情让大家关注到空调和空气健康问题,海尔空调在行业第一个推出56℃除菌自清洁空调,更因“只吹干净风”获得自清洁市场份额第一。到目前,行业也纷纷推出类似的产品,那么,海尔56℃除菌自清洁空调到底有什么不一样?
在这次79℃地表高温的沙漠中,海尔56℃除菌自清洁空调能否成功挑战运行极限?在沙漠里吹空调的愿望能实现吗?
7月12日,我们将会通过许多你意想不到的创意挑战项目一一为你呈现,现场还有神秘体验官见证海尔56℃除菌自清洁空调。相信会给你带来震撼和惊喜!
" />79℃沙漠是空调的“禁区”!海尔56℃除菌空调将发起挑战,能行?—万维家电网
90vs体育讯 北京时间3月2日,长春亚泰足球俱乐部透露,球员谭龙入选中国男足2023年第一期集训名单,这是他生涯第12次入选国家队。以下是该俱乐部的撰文。
2月27日,中国足协公布中国男足2023年第一期集训名单,长春亚泰球员谭龙入选,这是他第12次入选国家队。此前,长春亚泰已于2月8日在海口展开新赛季备战工作,谭龙将从驻地无缝对接国家队。
为备战2023卡塔尔亚洲杯决赛阶段及2026美加墨世界杯亚洲区预选赛赛事,中国男足将于2023年3月1日至27日在国内海口、新西兰进行集训,并参加热身赛。本期集训征调24名球员,亚泰前锋谭龙得到了国足新帅扬科维奇的认可。此外,亚泰青训出品的何超(武汉三镇)、李帅(上海海港)也榜上有名。
进入2023年,即将35岁的谭龙已为国征战10场比赛,打进2球。2022年,谭龙作为超龄球员入选由扬科维奇率领的中国男足选拔队,参加了在日本举行的“东亚杯”,并在7月27日的收官战中一剑封喉,帮助中国男足选拔队1比0战胜中国香港队,获得本届赛事季军。这粒进球也让他成为国家队中进球年龄最大的国脚。
" />国足公布2023年第一期集训名单 谭龙在列
Copyright © 2026-now 视野线 版权所有